Ordinary kriging#
Ordinary kriging (OK) estimates an unknown value at a target location as a weighted average of nearby observations, with weights chosen so that the estimator is unbiased and has minimum variance.
Minimal example#
import numpy as np
from krigekit import ordinary_kriging
rng = np.random.default_rng(42)
obs_coord = rng.uniform(0, 100, (50, 2))
obs_value = rng.normal(5.0, 1.0, 50)
grid_coord = np.mgrid[0:101:5, 0:101:5].reshape(2, -1).T # 21×21 = 441 points
est, var = ordinary_kriging(
obs_coord, obs_value, grid_coord,
vgm_spec=dict(vtype="sph", nugget=0.1, sill=0.9, a_major=40.0),
nmax=20,
)
# est.shape → (441,) var.shape → (441,)
{kind=link}
{kind=link}
Simple kriging#
Simple kriging (SK) treats the mean as known rather than estimating it from
the data. Pass unbias=0 and a sk_mean:
from krigekit import Kriging
k = Kriging(ndim=2, nvar=1, unbias=0)
k.set_obs(ivar=1, coord=obs_coord, value=obs_value,
sk_mean=float(obs_value.mean()))
k.set_vgm(ivar=1, jvar=1, vtype="sph", nugget=0.1, sill=0.9, a_major=40.0)
k.set_grid(coord=grid_coord)
k.set_search(ivar=1, nmax=20)
k.solve()
est, var = k.get_results()
Anisotropic variogram#
Specify different ranges along each axis. azimuth rotates the major axis
clockwise from North (degrees):
from krigekit import Kriging
k = Kriging(ndim=2, nvar=1)
k.set_obs(ivar=1, coord=obs_coord, value=obs_value)
k.set_vgm(ivar=1, jvar=1,
vtype="sph",
nugget=0.05, sill=0.95,
a_major=80.0, a_minor1=30.0, # 8:3 anisotropy ratio
azimuth=30.0) # NNE–SSW orientation
k.set_grid(coord=grid_coord)
k.set_search(ivar=1, nmax=20)
k.solve()
est, var = k.get_results()
Limiting the search neighbourhood#
nmax controls the maximum number of neighbours used per kriging system.
A smaller nmax is faster but may reduce accuracy in sparse areas.
maxdist adds a hard distance cutoff:
k.set_search(ivar=1, nmax=15, maxdist=50.0)
Sector search#
To prevent candidate neighbours from clustering in a single direction (which can happen when data is densely sampled along lines or clusters, leaving other directions unrepresented), you can enable sector search.
When sector_search=True is passed to set_search, the search space is divided into sectors centered on the target prediction point:
2D space: Divided into 4 quadrants.
3D space (and Space-Time kriging): Divided into 8 octants.
Under sector search, nmax acts as a limit per sector rather than a global limit. The search selects up to nmax closest neighbours from each quadrant/octant. This results in a maximum of 4 * nmax neighbours in 2D, or 8 * nmax in 3D/ST, ensuring a balanced spatial distribution around the estimation point.
Comparison example#
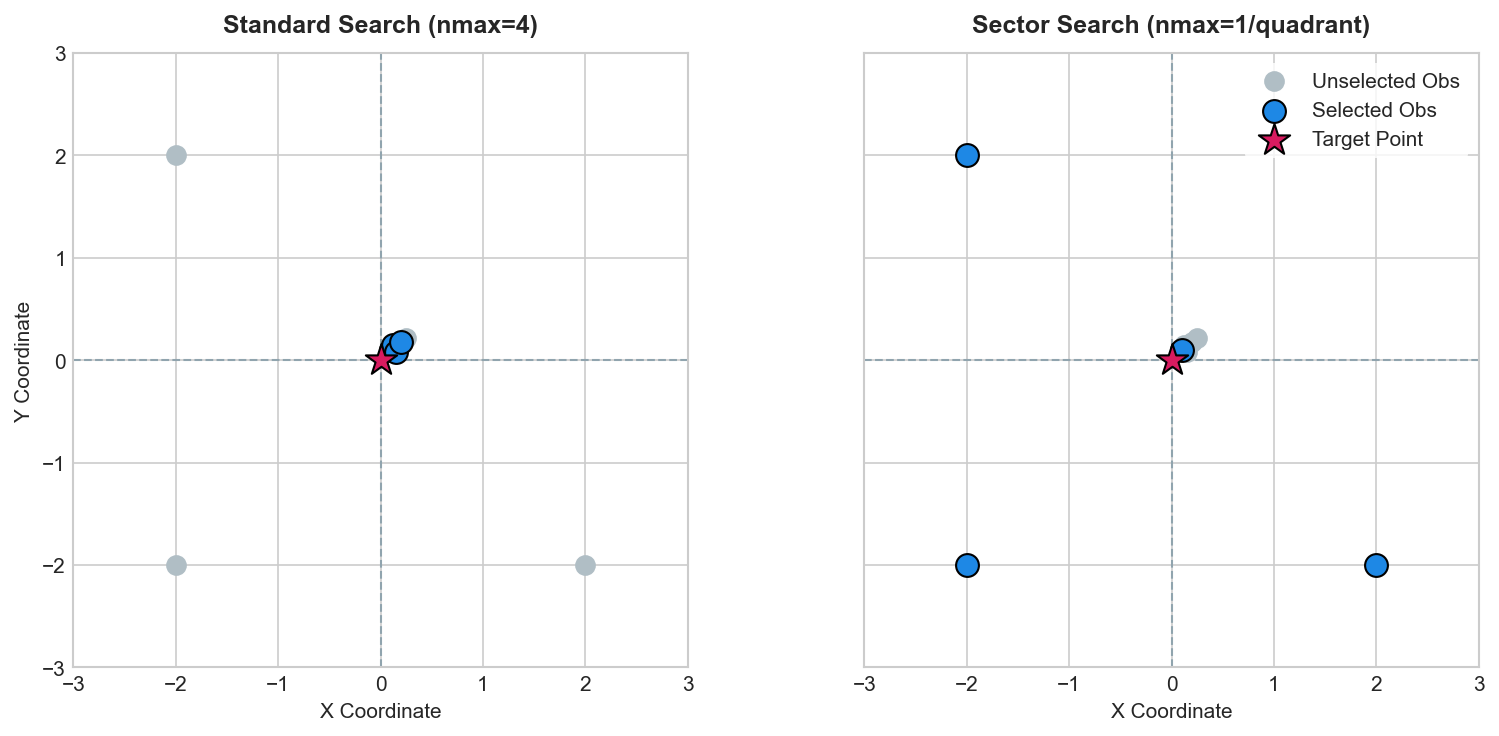
The figure below shows a comparison between standard search and sector search. The target location is at the origin (0, 0). There is a dense cluster of observations in Quadrant 1, and only single observations in Quadrants 2, 3, and 4.
Standard search (nmax=4) selects the four closest neighbours, which all fall within the Quadrant 1 cluster. The other directions are not represented.
Sector search (nmax=1 per quadrant) selects the closest neighbour from each quadrant, ensuring that all directions are represented in the kriging weights.
Here is the Python script to run and compare this scenario:
import numpy as np
from krigekit import Kriging
# Target point at the origin
target = np.array([[0.0, 0.0]])
# Observations: a dense cluster in Q1, and sparse points in Q2, Q3, Q4
obs_coord = np.array([
[0.1, 0.1], [0.12, 0.15], [0.15, 0.08], [0.2, 0.18], [0.25, 0.22], # Q1
[-2.0, 2.0], # Q2
[-2.0, -2.0], # Q3
[2.0, -2.0] # Q4
])
obs_value = np.array([10.0, 10.5, 9.8, 10.2, 10.1, 20.0, 15.0, 25.0])
# 1. Standard search (selects 4 closest, all in Q1)
k_std = Kriging(ndim=2, nvar=1, store_weight=True)
k_std.set_obs(ivar=1, coord=obs_coord, value=obs_value)
k_std.set_vgm(ivar=1, jvar=1, vtype="sph", nugget=0.0, sill=1.0, a_major=10.0)
k_std.set_grid(coord=target)
k_std.set_search(ivar=1, nmax=4, sector_search=False)
k_std.solve()
w_std = k_std.get_weights()
print("Standard selected indices:", w_std["inear"][0, 0, :w_std["nnear"][0, 0]])
# Output: [1, 2, 3, 4] (all indices from the Q1 cluster)
# 2. Sector search (selects up to 1 per quadrant)
k_sec = Kriging(ndim=2, nvar=1, store_weight=True)
k_sec.set_obs(ivar=1, coord=obs_coord, value=obs_value)
k_sec.set_vgm(ivar=1, jvar=1, vtype="sph", nugget=0.0, sill=1.0, a_major=10.0)
k_sec.set_grid(coord=target)
k_sec.set_search(ivar=1, nmax=1, sector_search=True)
k_sec.solve()
w_sec = k_sec.get_weights()
print("Sector selected indices:", w_sec["inear"][0, 0, :w_sec["nnear"][0, 0]])
# Output: [1, 6, 7, 8] (one index from each quadrant)
Observation coordinates are checked when set_obs is called. Duplicate
coordinate tuples within the same variable are rejected because the search tree
and kriging system require unique observation locations. Aggregate or remove
duplicate observations before loading them.
Result clipping#
Clip estimates to a physically meaningful range with bounds:
k = Kriging(bounds=[0.0, 100.0])
Values outside the range are clamped after kriging, which avoids negative estimates for strictly positive quantities (e.g. porosity, concentration).
Reusing a Kriging object#
You can call set_obs, set_vgm, set_grid, set_search, and solve
again on the same object to estimate a new dataset without recreating it.
Use append=False on set_vgm to replace the previous variogram model:
k = Kriging(ndim=2, nvar=1)
for obs_c, obs_v in dataset_sequence:
k.set_obs(ivar=1, coord=obs_c, value=obs_v)
k.set_vgm(ivar=1, jvar=1, vtype="sph", sill=1.0, a_major=40.0,
append=False) # ← reset variogram each iteration
k.set_grid(coord=grid_coord)
k.set_search(ivar=1, nmax=20)
k.solve()
est, var = k.get_results()
Cross-validation#
Leave-one-out cross-validation reuses the same workflow, switching the grid to CV mode:
k = Kriging(ndim=2, nvar=1)
k.set_obs(ivar=1, coord=obs_coord, value=obs_value)
k.set_vgm(ivar=1, jvar=1, vtype="sph", nugget=0.1, sill=0.9, a_major=40.0)
k.set_grid_cv(ivar=1) # estimation targets = leave-one-out positions
k.set_search(ivar=1, nmax=20)
k.solve()
cv_est, cv_var = k.get_results()
cv_est[i] is the kriging prediction at observation i using all other
observations.
See also#
Variogram models — model types, nesting, anisotropy
Array conventions — coordinate and result shapes
API reference — full
Krigingclass documentation